](https://deep-paper.org/en/paper/2409.08474/images/cover.png)
元学习,即“学会学习”,是机器学习最具前景的研究领域之一。它的目标是使模型能够仅用少量样本就快速适应新任务——这在个性化机器人、小样本图像分类和自适应医疗系统等应用中至关重要。
大多数主流元学习方法,包括著名的 模型无关元学习 (MAML) 算法,都围绕一个简单而优雅的思想: 学习一个良好的模型初始化。如果模型的初始参数已经接近多种任务的最优解,那么适应新任务时只需轻微调整——也许只需一到两个梯度下降步骤。这一“良好初始化”原则构成了许多双层优化框架的核心,这类框架包括一个内循环 (任务特定的适应) 和一个外循环 (基于任务表现的元更新) 。
然而,如果这个核心假设——“一步就够”的规则——虽然理论上方便,却在实践中存在问题呢?研究论文 《从学习的视角重新思考元学习》 挑战了这一假设,指出对单步适应的依赖常常导致复杂任务的欠拟合和简单任务的过拟合 。
为了解决这些问题,作者提出了一种新的视角——一种理念上的转变。他们建议我们重新思考元学习模型的真正含义,并引入一种名为 TRLearner (任务关系学习器) 的即插即用方法,该方法利用任务间的关系来校准学习。通过在相关任务间保持一致性,TRLearner 帮助模型聚焦于有意义的信息,而不是受限于单步更新的僵化假设。
本文将逐步解读该论文的思想和推理过程:
- 为什么“良好初始化”的观点在实践中可能会失败。
- 通过 学习视角 (Learning Lens) 重新定义的元学习框架。
- TRLearner 如何提取并利用任务关系来改进训练。
- 实验结果展示 TRLearner 在不同领域的影响。
标准元学习框架
要理解创新之处,我们首先要了解起点。
大多数现代元学习算法遵循一种双层优化过程。该过程从任务分布 \(p(\mathcal{T})\) 开始。每个训练批次会采样多个任务 \( \tau_i \),每个任务都有自己的小数据集,分为支持集 (用于适应) 和查询集 (用于评估) 。
全局模型 \( \mathcal{F}_{\theta} \) 的训练分为两个阶段:
1. 内循环 (任务适应) : 对于每个采样的任务 \( \tau_i \),模型从 \( \mathcal{F}_{\theta} \) 出发,利用其支持集 \( \mathcal{D}_i^s \) 进行适应,通常仅用 一个梯度下降步骤 :
\[ f_{\theta}^{i} \leftarrow \mathcal{F}_{\theta} - \alpha \nabla_{\mathcal{F}_{\theta}} \mathcal{L}(\mathcal{D}_{i}^{s}, \mathcal{F}_{\theta}) \]其中,\( \alpha \) 为步长,\( \mathcal{L} \) 衡量任务特定损失。良好的初始化意味着这一步就能生成高性能的任务专属模型 \( f_{\theta}^{i} \)。
2. 外循环 (元更新) : 在所有任务完成适应后,使用每个任务的查询集 \( \mathcal{D}_{i}^{q} \) 评估性能。聚合的查询损失通过反向传播更新全局模型:
\[ \mathcal{F}_{\theta} \leftarrow \mathcal{F}_{\theta} - \beta \nabla_{\mathcal{F}_{\theta}} \frac{1}{N_{tr}} \sum_{i=1}^{N_{tr}} \mathcal{L}(\mathcal{D}_{i}^{q}, f_{\theta}^{i}) \]其中 \( \beta \) 为“元”学习率。由于 \( f_{\theta}^{i} \) 依赖于 \( \mathcal{F}_{\theta} \),该过程涉及二阶微分。
尽管这种方法很有力量,但它假设单步梯度就能代表学习过程——这一简化在复杂任务中常常不成立。
当一步不足够时
这里存在一个悖论: 训练过程旨在找到最优的任务专属模型,却只允许单步内循环梯度更新。模型的期望能力与实际适应行为之间的这种不匹配导致了建模误差 。
为展示其影响,作者使用 miniImageNet 数据集中不同复杂度的任务进行了实验,每个元学习模型都采用固定的“单步”设定。

“MAML 在不同复杂度任务上的表现。任务 D1 和 D2 的测试准确率提升缓慢 (欠拟合) ,而较简单的任务 D3 和 D4 出现测试准确率分化 (过拟合) 。”
结果揭示两种截然不同的行为:
- 复杂任务 : 即使训练收敛后,测试准确率仍缓慢上升,说明单步学习无法充分表达任务( 欠拟合 )。
- 简单任务 : 训练准确率迅速升高,但测试准确率下降( 过拟合 )。
结论: 固定的“单步学习”假设过于僵化。任务的复杂度应决定适应步数。
重新思考元学习: 学习的视角
为了突破固定适应的限制,论文重新定义了元学习的本质。
作者不再将 \( \mathcal{F}_{\theta} \) 仅视作参数初始化,而是将其看作一个将任务映射为任务专属模型的函数 , 即:
\[ \mathcal{F}_{\theta}(\tau_i) = f_{\theta}^{i} \]从概念上讲,这使 \( \mathcal{F}_{\theta} \) 成为一种“模型生成器”,为每个任务生成专属模型。
如何设计一个能输出其他模型的模型?理论上,一个巨大的多层感知机 (MLP) 可以表示这种映射,但参数量会难以承受。作者巧妙地引入了一个方法: 通过一个非线性元层, 让梯度下降本身成为模型的一部分 。
在这一框架中,元学习模型包含两个组成部分:
- 模型初始化层 — 常规神经网络层 (如 ResNet) ,用于特征提取。
- 元层 (Meta-Layer) — 通过梯度更新实现的非线性层,使适应更具表达力。
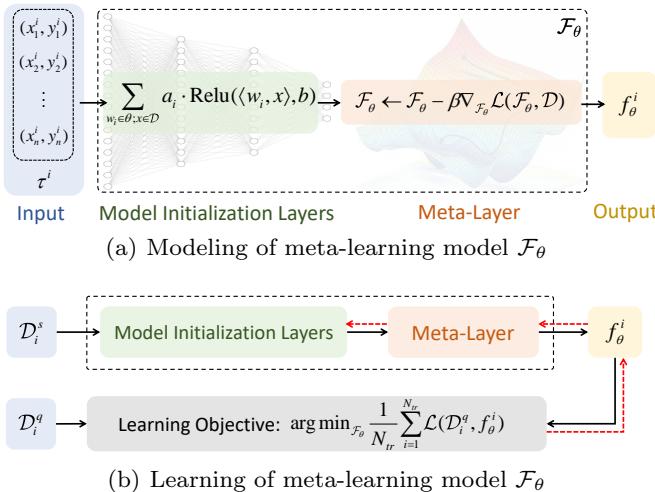
“元学习系统 \( \mathcal{F}_{\theta} \) 的建模: (a) 展示任务如何通过初始化层和元层生成专属模型,(b) 描述了使用支持集与查询集进行的前向与反向优化。”
这种解释赋予模型灵活性——复杂任务可用更多元层增强学习,而简单任务则可减小元层以避免过拟合。然而,为每个场景确定最佳元层数量仍有挑战。因此,论文提出了一个更智能的替代方法: 在训练过程中调控任务间的信息流 。
利用任务关系调控学习: TRLearner
相比动态调整架构,作者关注于控制模型跨任务的学习方式。他们的关键理论洞见( 定理 1 )指出: 一个任务的分类器可以通过融合其他相似任务的特征而进一步提升性能 。
这带来了 TRLearner (任务关系学习器) , 一种通过推断任务间相似性并将这种关系用于正则化训练的方法。本质上,TRLearner 鼓励模型在相关任务上表现一致——捕捉重要共享特征,减少任务特定噪声。
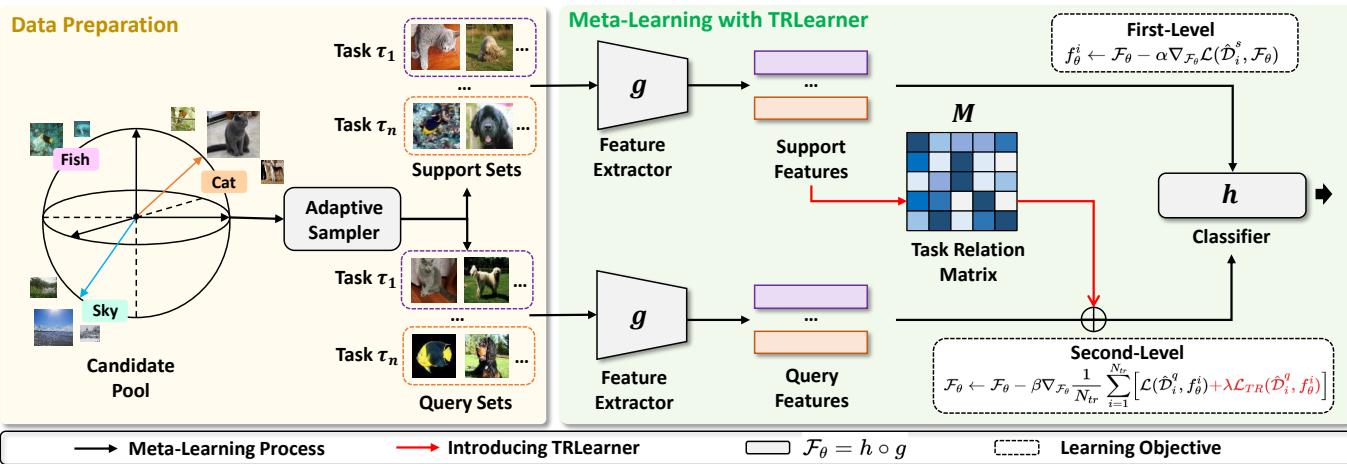
“结合 TRLearner 的元学习框架: 数据采样、特征提取、任务关系矩阵构建与关系感知优化。”
TRLearner 的工作流程包括两个核心步骤:
1. 提取任务关系
一个任务关系矩阵 \( \mathcal{M} = \{m_{ij}\} \) 用于量化任务对之间的相似性。直接比较所有样本往往不可靠,因此该方法利用一个自适应采样器提取每个任务的代表性元数据。这些元数据 \( \hat{\mathcal{D}}_{i}^{s} \) 经由特征提取器 \( g \) 生成任务表示,然后通过多头相似性层计算任务间的余弦相似度:
\[ m_{i,j} = \frac{1}{K} \sum_{k=1}^{K} \cos(\omega_k \odot g(\hat{\mathcal{D}}_i^s), \omega_k \odot g(\hat{\mathcal{D}}_j^s)) \]其中 \( K \) 为头数,\( \omega_k \) 为可学习权重,用于加强有意义的特征维度。最终得到结构化矩阵,反映任务间的关系。
2. 实施关系感知正则化
给定 \( \mathcal{M} \),模型在学习目标中加入一个关系感知一致性正则项 \( \mathcal{L}_{TR} \):
\[ \mathcal{L}_{TR}(\hat{\mathcal{D}}_{i}^{q}, f_{\theta}^{i}) = \frac{1}{N_{i}^{q}} \sum_{j=1}^{N_{i}^{q}} \ell\left(\frac{\sum_{p \neq i} m_{ip} f_{\theta}^{p}(x_{ij})}{\sum_{q \neq i} m_{iq}}, y_{i,j}\right) \]该项确保任务 \( \tau_i \) 的预测与相似任务的预测保持一致,并按相似度加权。整个元学习目标变为:
\[ \arg\min_{\mathcal{F}_{\theta}} \frac{1}{N_{tr}} \sum_{i=1}^{N_{tr}} \big[ \mathcal{L}(\hat{\mathcal{D}}_{i}^{q}, f_{\theta}^{i}) + \lambda \mathcal{L}_{TR}(\hat{\mathcal{D}}_{i}^{q}, f_{\theta}^{i}) \big] \]参数 \( \lambda \) 用于平衡标准学习和关系感知学习。这一损失机制促使模型提取共享且鲁棒的特征,从而缓解欠拟合与过拟合问题。
实验验证: TRLearner 的表现
作者在多个领域的基准测试中验证了 TRLearner——涵盖回归、图像分类、药物活性预测和姿态估计——并与多种基线算法 (MAML、ProtoNet、ANIL、T-NET、MetaSGD) 进行对比。
回归
在 Sinusoid 和 Harmonic 回归任务中,TRLearner 明显降低了均方误差 (MSE) 。例如,在 5-shot 学习中,MAML+TRLearner 将 MSE 从 0.593 降低至 0.400。
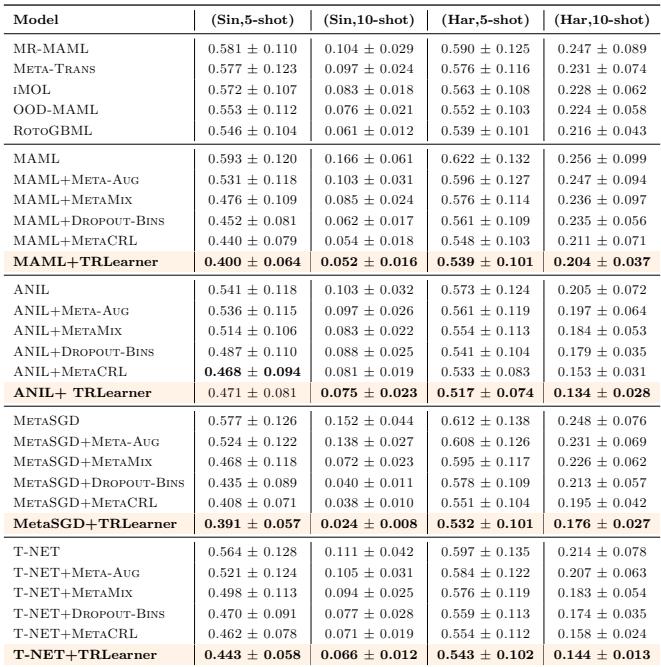
“回归任务 MSE 对比结果。TRLearner 始终取得最佳表现 (橙色高亮部分) 。”
图像分类
在 miniImageNet 和 Omniglot 的标准小样本学习 (SFSL) 以及 miniImageNet→CUB 和 Places 的跨域小样本学习 (CFSL) 中,TRLearner 显著提高了所有基线的准确率。
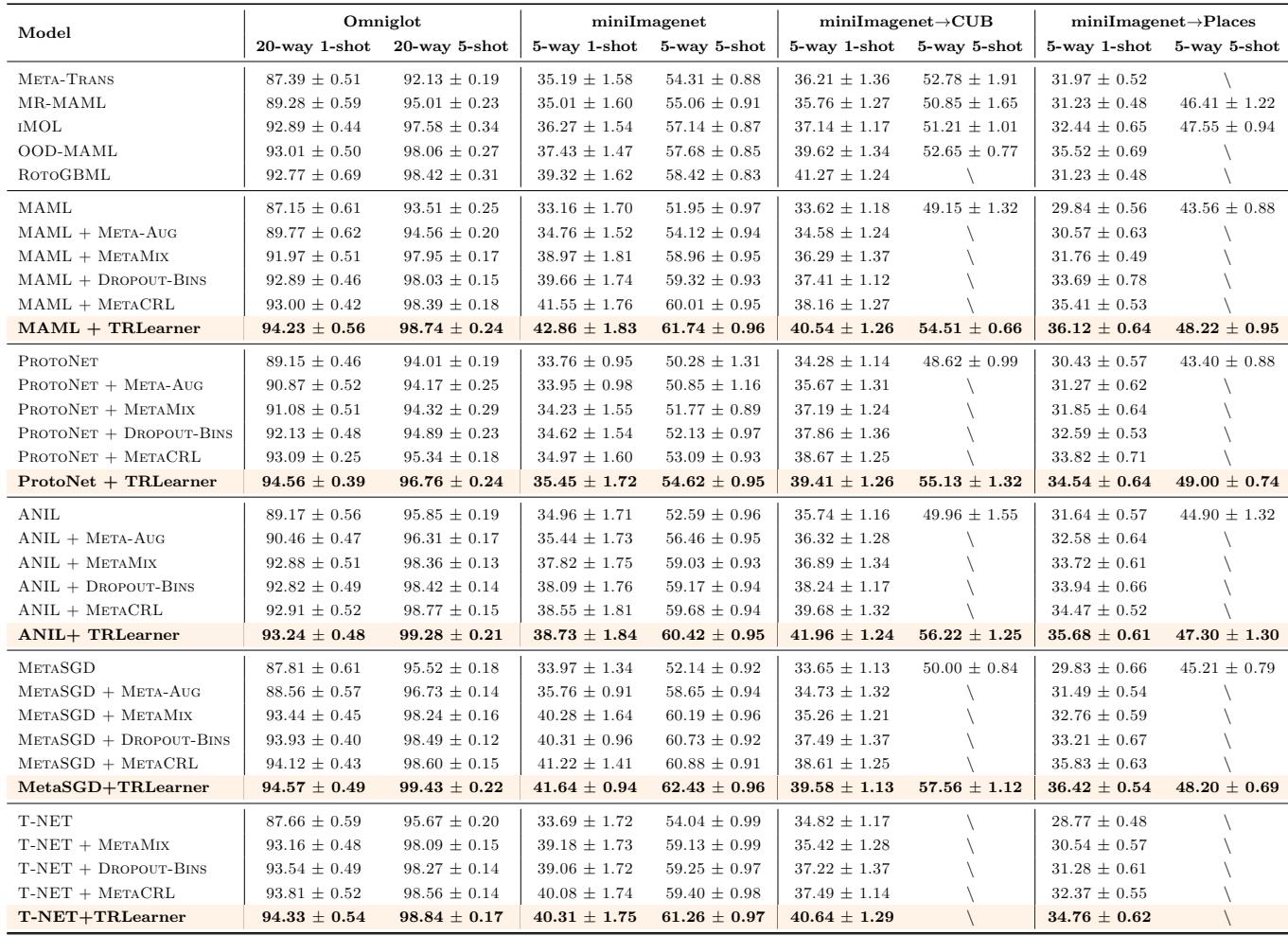
“TRLearner 在多种小样本和跨域场景下均提升了准确率。”
药物活性与姿态预测
在 pQSAR 药物活性分析 和 Pascal 3D 姿态估计 等复杂任务中,TRLearner 的性能与现有最先进模型相当或更优,证明其关系校准能力不局限于图像任务。
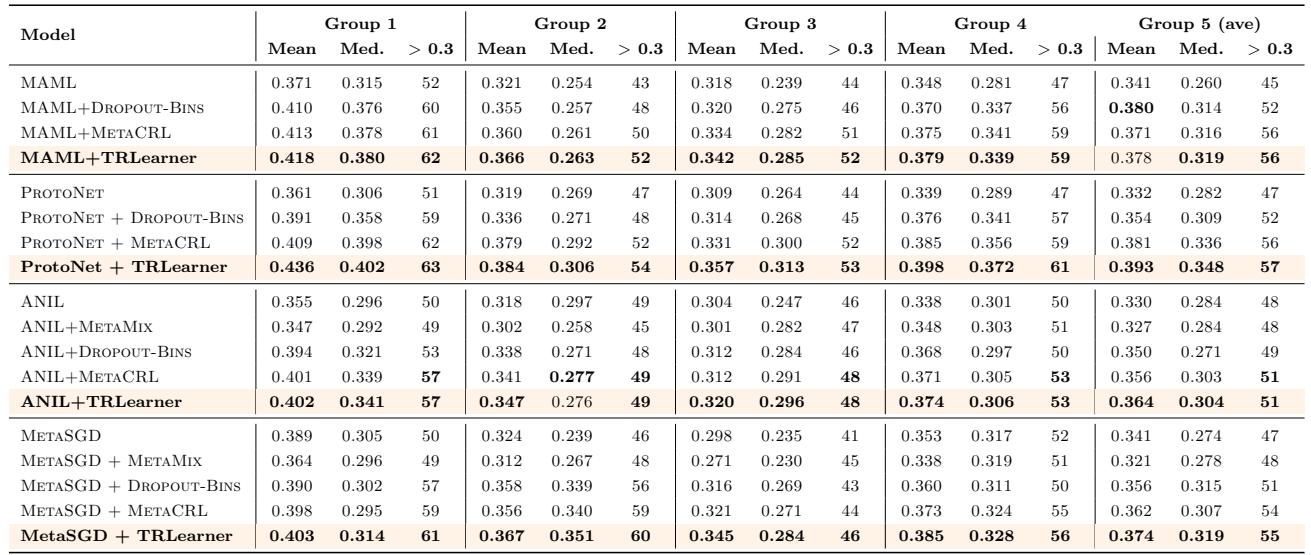
“药物活性预测表现。TRLearner 获得最高的平均与中位可靠性得分。”
分布外 (OOD) 泛化
在 Meta-Dataset (包含 10 个跨视觉领域的任务集) 上评估时,TRLearner 展现出显著的 OOD 泛化提升。以 MAML 为例,整体准确率从 24.5% 提升至 33.0%,OOD 准确率则从 19.2% 提升至 29.5%。
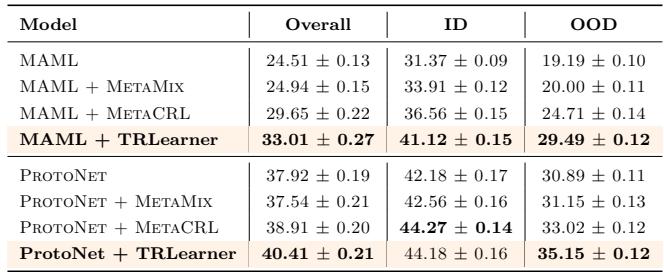
“Meta-Dataset 上的域外泛化能力提升。TRLearner 带来持续增益。”
TRLearner 的效果解析与可视化洞见
论文的消融实验揭示了 TRLearner 如何解决传统元学习的缺陷,并说明了性能提升的来源。
1. 解决欠拟合与过拟合问题: 使用 TRLearner 复现开篇实验后,所有任务复杂度下的曲线更加平滑且性能更优。
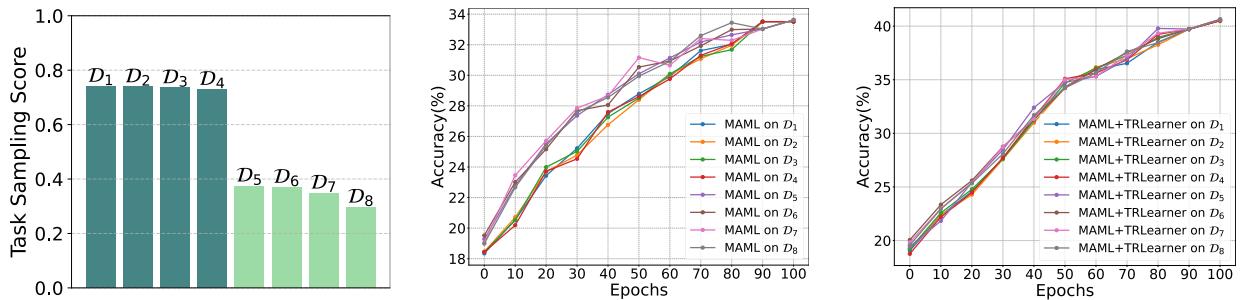
“引入 TRLearner 稳定了 MAML 的学习行为,并显著提升总体准确率。”
2. 降低对元层的依赖: 在没有 TRLearner 时,性能随着元层增加才提高。而有了 TRLearner,仅一个元层即可实现竞争性准确率,并在更深层配置下保持稳定。
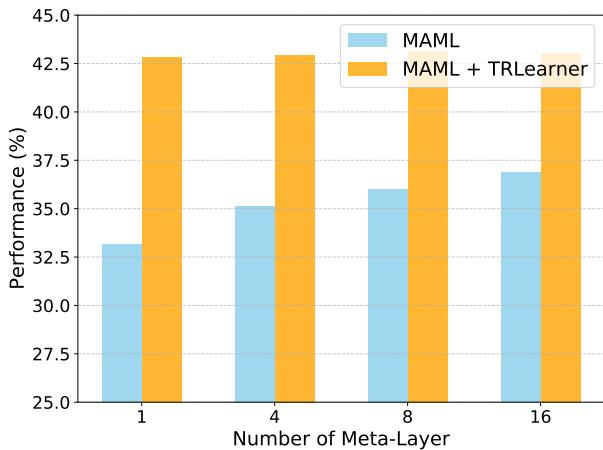
“TRLearner 减轻建模误差,实现无论元层深度如何都能保持高稳定性。”
3. 关系具有可解释性: 任务相似性矩阵的可视化结果显示,使用 TRLearner 的多头相似性层后,任务关系更加结构化、区分性更强。
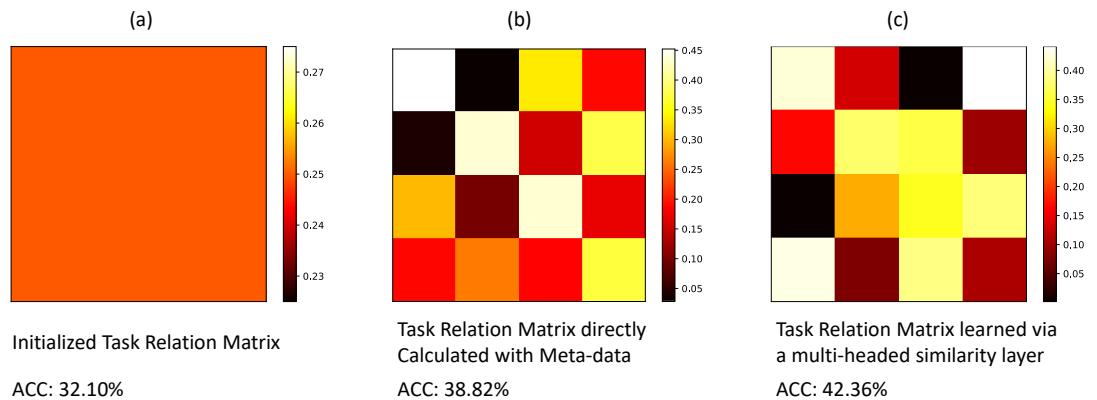
“学习到的任务关系矩阵 (c) 呈现更清晰的结构模式,并带来了更高的准确率。”
4. 高效的性能代价权衡: 虽然训练耗时略长,但与其他正则化方法相比,TRLearner 在准确率与成本比上表现最佳。
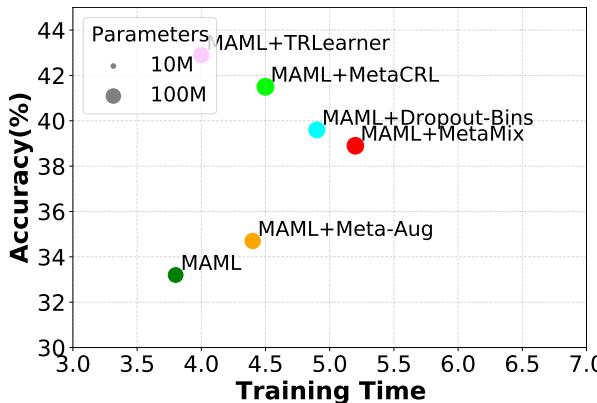
“TRLearner 在相似训练时间下提供最佳性能提升与权衡。”
从理论到实践: 为何重要
元学习的哲学信念一直是要学会如何学习。这篇论文再次证明,学习本身可以通过让任务彼此学习来得到改善,而不必单纯依靠更多参数或数据。
关键启示如下:
- “单步”假设易失效: 依赖单个梯度步骤会使模型在复杂与简单任务间出现欠拟合或过拟合。
- 学习视角带来灵活性: 将元学习器看作函数形式的模型生成器,能实现更好的理论匹配与适应能力。
- 任务关系是强有力的信号: TRLearner 的相似性矩阵帮助模型聚焦于可迁移、可泛化的特征。
- 一致性促进泛化: TRLearner 的一致性正则化确保相似任务输出相似结果,增强跨域鲁棒性。
结语
TRLearner 不只是技术层面的改进——它代表了元学习思维的进化。它不再将任务视为独立样本,而是看作知识生态系统中彼此关联的节点。这种从 孤立学习 到 关联学习 的转变,可能成为下一代自适应机器学习系统的标志。
通过不仅“学会如何学习”,更“学会如何关联”,我们释放出模型的真正潜能,使其能更快适应、更好泛化,并深刻理解所面对的任务。