](https://deep-paper.org/en/paper/2505.04278/images/cover.png)
引言
在时间序列预测的世界里——无论是预测股价、医院入院率还是电力需求——知道将会发生什么仅仅是战斗的一半。另一半,往往也是更关键的一半,是知道我们对这一预测有多大把握。
想象一下人工智能在预测交通流量。预测“每分钟 50 辆车”是有用的。但预测“每分钟 50 辆车,误差在 5 辆以内”与“每分钟 50 辆车,误差可能达 40 辆”,这两种情况导致的决策截然不同。这就是概率时间序列预测的领域。
最近, 去噪扩散概率模型 (Denoising Diffusion Probabilistic Models, DDPMs) ——即 DALL-E 和 Stable Diffusion 等图像生成器背后的技术——在该领域展现出了惊人的潜力。它们非常擅长生成复杂的分布。然而,当应用于现实世界数据时,它们存在一个明显的缺陷: 通常假设数据中的“噪声” (不确定性) 是恒定的,或者遵循某种简单、固定的模式。
实际上,数据是非平稳的 (non-stationary) 。 股市在崩盘期间波动性会发生变化;流感病例的方差在爆发期间会爆炸式增长。标准的扩散模型很难适应这种不断变化的不确定性水平。
在这篇文章中,我们将深入探讨一篇新的研究论文: “Non-stationary Diffusion For Probabilistic Time Series Forecasting” (NsDiff) 。 我们将探索这一新颖的框架如何摒弃传统模型的僵化假设,使其能够动态适应现实世界中不断变化的混沌状态。
问题所在: 当物理学遇上统计学
为了理解为什么 NsDiff 是必要的,我们需要先看看扩散模型通常如何处理时间序列。
通用的预测方法是训练一个模型 \(f(\mathbf{X})\) 来预测未来的序列 \(\mathbf{Y}\)。这通常给出条件期望,即“平均”结果。为了获得概率分布 (即不确定性) ,扩散模型向数据中添加噪声,然后学习逆转这一过程。
大多数现有的 DDPM 依赖于加性噪声模型 (Additive Noise Model, ANM) 。 它们假设:
\[ \mathbf{Y} = f(\mathbf{X}) + \boldsymbol{\epsilon} \]在这里,\(\boldsymbol{\epsilon}\) 代表平稳高斯噪声 \(\mathcal{N}(\mathbf{0}, \mathbf{I})\)。用通俗的话说,这个模型假设虽然趋势 (均值) 可能会根据输入 \(\mathbf{X}\) 而改变,但不确定性 (噪声的方差) 是固定且不变的。
视觉化展示其失效模式
这种假设在高风险场景中会失效。考虑预测患有类流感疾病 (ILI) 的患者数量。随着季节达到高峰,不仅患者数量增加,而且该数字的不可预测性也会增加。
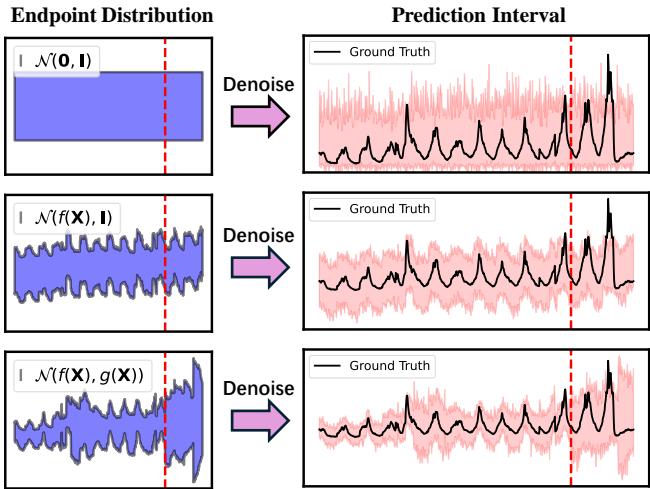
上面的图 1 完美地说明了这一局限性:
- 第一行 (TimeGrad): 该模型假设标准的均值为 0、方差为单位矩阵的高斯终点 \(\mathcal{N}(0, \mathbf{I})\)。注意右侧的预测区间 (粉色阴影区域) 是均匀的,未能捕捉到上升的趋势或扩大的不确定性。
- 第二行 (TMDM): 该模型有所改进,目标是变化的均值 \(\mathcal{N}(f(\mathbf{X}), \mathbf{I})\)。它捕捉到了趋势 (曲线向上) ,但粉色区间的宽度保持不变。本质上,它认为在疫情高峰期的预测与开始时一样“安全”。
- 第三行 (NsDiff - 本文重点): 该模型的目标是 \(\mathcal{N}(f(\mathbf{X}), g(\mathbf{X}))\)。它既捕捉到了上升的趋势,也捕捉到了扩大的不确定性。随着情况变得更加动荡,粉色区间也随之变宽。
核心方法: 非平稳扩散 (NsDiff)
研究人员提出了一种名为 NsDiff 的解决方案。其核心创新在于放宽了僵化的加性噪声模型,并将其替换为位置-尺度噪声模型 (Location-Scale Noise Model, LSNM) 。
1. 位置-尺度噪声模型 (LSNM)
NsDiff 不再添加固定的噪声,而是使用更灵活的方程来对未来序列进行建模:
在这个方程中:
- \(f_{\phi}(\mathbf{X})\) 对条件期望 (趋势) 进行建模。
- \(g_{\psi}(\mathbf{X})\) 对变化的不确定性 (方差) 进行建模。
- \(\epsilon\) 是标准高斯噪声。
通过引入 \(g_{\psi}(\mathbf{X})\),模型承认噪声的“尺度”取决于输入数据 \(\mathbf{X}\)。如果输入暗示了一段动荡时期 (比如交通数据中的假期高峰) ,\(g_{\psi}(\mathbf{X})\) 就会变大。如果输入暗示了一段平静时期,它就会变小。
\(f_{\phi}\) 和 \(g_{\psi}\) 均由预训练的神经网络 (如 Transformer 或 MLP) 实现,为扩散过程提供“先验知识”。
2. NsDiff 框架
我们如何训练一个扩散模型来遵守这个新的噪声模型呢?作者设计了一个集成感知不确定性的噪声调度 (uncertainty-aware noise schedule) 的框架。
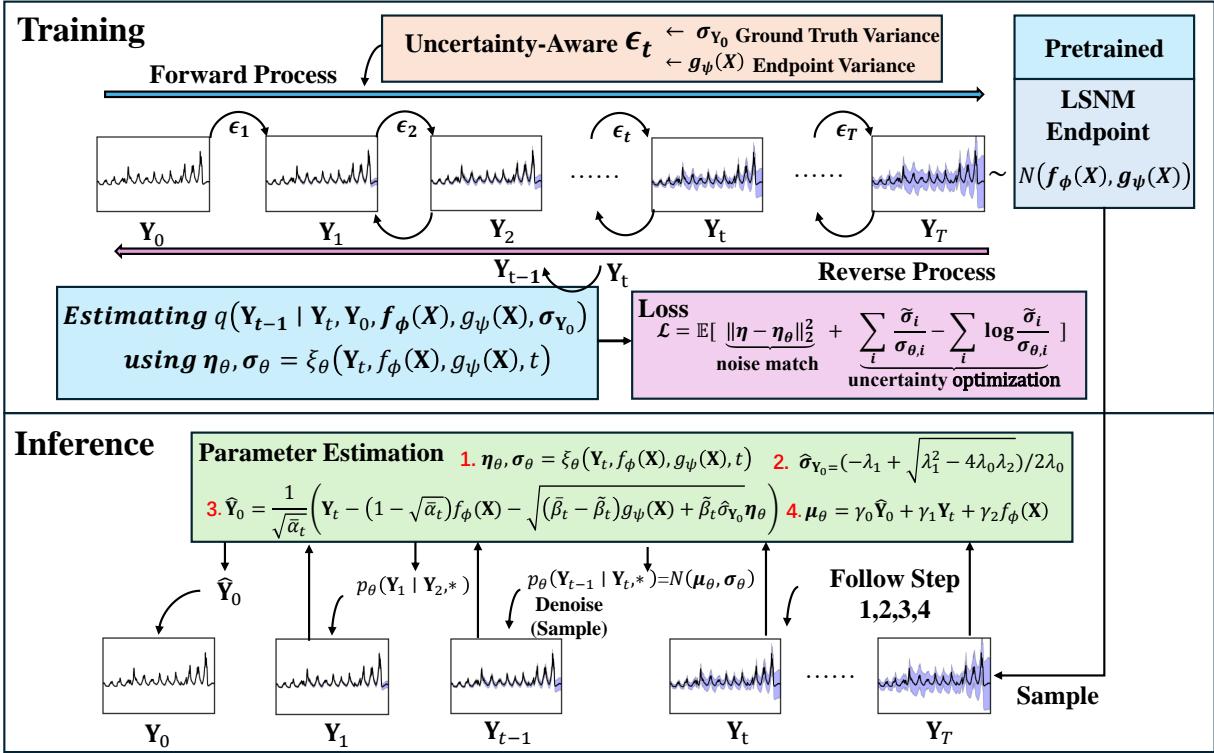
如图 2 所示,该过程涉及两个主要阶段:
- 训练 (Training - 顶部): 我们获取地面真值 \(\mathbf{Y}_0\) 并逐渐添加噪声,直到其达到目标分布 \(\mathbf{Y}_T\)。关键在于,与标准 DDPM 中 \(\mathbf{Y}_T\) 是随机噪声不同,这里的 \(\mathbf{Y}_T\) 来源于我们的先验 \(f_{\phi}(\mathbf{X})\) 和 \(g_{\psi}(\mathbf{X})\)。
- 推理 (Inference - 底部): 我们从预测的终点分布 (使用先验) 开始采样,并迭代去噪以生成最终预测。
3. 感知不确定性的噪声调度
这部分是数学上的精妙之处。在标准的扩散模型中,你会根据固定的调度 \(\beta_t\) 添加噪声。在 NsDiff 中,每一步添加的噪声必须考虑到我们正在移向一个特定的、依赖于数据的方差 \(g_{\psi}(\mathbf{X})\)。
前向过程分布 \(q(\mathbf{Y}_t | \mathbf{Y}_{t-1})\) 被修改了。任何步骤 \(t\) 的噪声数据分布计算如下:
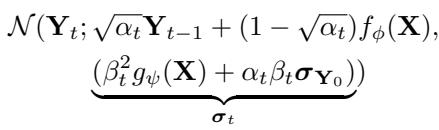
仔细观察上式中的方差项 \(\pmb{\sigma}_t\)。它是预测方差 \(g_{\psi}(\mathbf{X})\) 和实际数据方差 \(\sigma_{\mathbf{Y}_0}\) 的加权组合。
- 当 \(t \to T\) (噪声更多) 时,方差收敛于我们估计的 \(g_{\psi}(\mathbf{X})\)。
- 当 \(t \to 0\) (噪声更少) 时,它反映了实际数据。
这种动态调整允许扩散过程在干净数据和我们想要建模的复杂、非平稳终点之间架起“桥梁”。
4. 逆向过程与损失函数
逆向过程 (去噪) 的目标是估计被添加的噪声 \(\boldsymbol{\eta}\)。神经网络 \(\xi_{\theta}\) 接收噪声步骤 \(\mathbf{Y}_t\)、先验 \(f_{\phi}\) 和 \(g_{\psi}\) 以及时间步长 \(t\) 作为输入。
用于训练该网络的损失函数很有趣,因为它不仅仅关注噪声的误差;它还针对方差进行了优化:
第一项 \(||\boldsymbol{\eta} - \boldsymbol{\eta}_{\theta}||^2\) 确保均值被正确估计 (DDPM 中的标准做法) 。右侧的求和项专门惩罚方差估计中的误差,迫使模型关注不确定性的尺度。
5. 推理: 二次方程解法
这里有一个引人入胜的技术细节。为了准确执行逆向去噪步骤,模型需要知道原始数据的方差 \(\sigma_{\mathbf{Y}_0}\)。
在训练期间,我们知道地面真值 \(\mathbf{Y}_0\),所以计算其方差很简单。但在推理期间 (预测未来时) ,我们没有 \(\mathbf{Y}_0\)。
我们可以直接使用预测器 \(g_{\psi}(\mathbf{X})\),但这相当于盲目信任预训练模型,而忽略了扩散模型在逆向过程中观察到的信息。相反,作者推导了估计的噪声方差 \(\sigma_{\theta}\) 与地面真值方差之间的关系。
结果表明,这种关系构成了一个一元二次方程:

通过求解这个关于 \(\sigma_{\mathbf{Y}_0}\) 的二次方程,模型可以在生成过程中动态估计目标数据的方差。
这使得 NsDiff 能够在生成样本时不断完善其对不确定性的理解,而不是仅仅依赖于预训练模型的初始猜测。
实验与结果
作者在九个真实世界数据集 (包括电力、交通和汇率) 以及旨在对不确定性处理进行压力测试的合成数据集上测试了 NsDiff。
真实世界表现
他们将 NsDiff 与 TimeGrad、CSDI 和 TMDM 等强基线模型进行了比较。使用的指标是 CRPS (连续概率排位分数——衡量分布的准确性) 和 QICE (分位数区间覆盖误差——衡量预测区间覆盖真实数据的程度) 。两个指标都是越低越好。
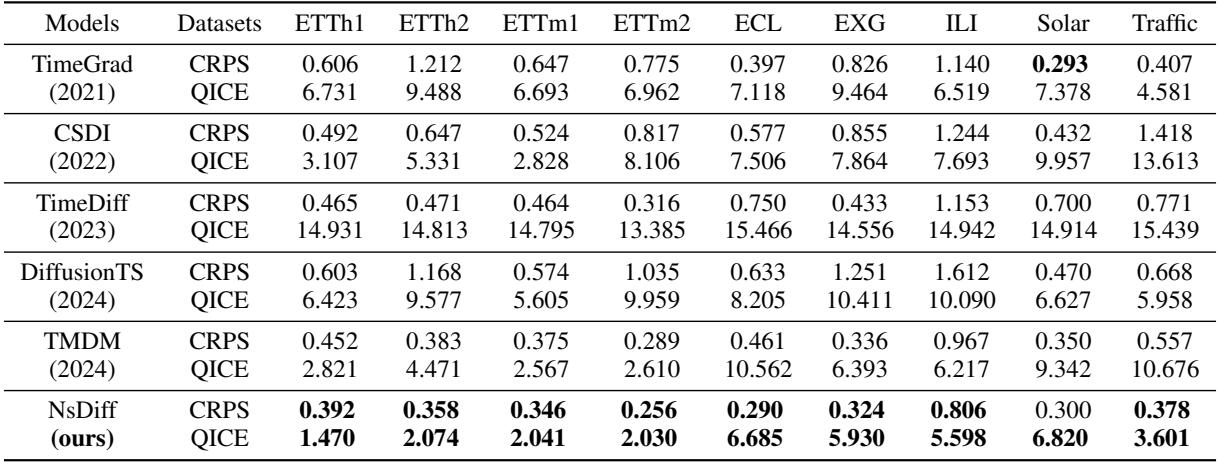
如表 3 所示,NsDiff 在几乎所有数据集上都取得了最先进的结果。
- 在Traffic (交通) 数据集上 (该数据集具有极高的不确定性变化) ,NsDiff 将 QICE 得分比 TMDM 降低了 66.3% 。
- 在 ETTh1 和 ETTh2 (电力变压器数据) 上,它将 QICE 降低了大约 50% 。
视觉验证
数字固然重要,但时间序列预测需要眼见为实。让我们看看 ETTh1 数据集的一个样本。

在图 3 中:
- TimeGrad 和 CSDI (右侧) 表现挣扎。TimeGrad 预测的是平坦的趋势,而实际上数据急剧下降。
- TMDM (左数第二个) 捕捉到了均值的下降 (黑线) ,但请看粉色区间。它是一个宽度恒定的管状。它没有意识到下降可能会引入更多的波动。
- NsDiff (左侧) 不仅捕捉到了下降,还提供了一个紧贴地面真值的紧密、准确的预测区间。
合成数据压力测试
为了严格证明 NsDiff 能更好地处理变化的方差,研究人员创建了合成数据集,其中的方差随时间线性或二次增长。
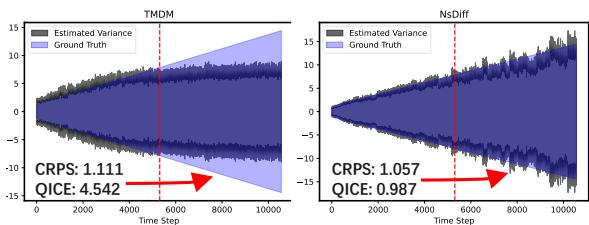
图 4 是一个“确凿的证据”。
- 左图 (TMDM) 显示该模型实际上在方差变化上“放弃了”。在红色虚线 (测试集) 之后,预测方差 (灰线) 变平,完全错过了地面真值方差 (蓝色阴影) 正在增加的事实。
- 右图 (NsDiff) 几乎完美地追踪了增加的方差。它理解环境已经改变,并相应地调整了其不确定性估计。
结论与启示
NsDiff 论文强调了生成式时间序列预测中的一个关键缺陷: 对不确定性平稳性的假设。通过坚持使用加性噪声模型,以前的最先进模型本质上就像戴着眼罩,能看到趋势往哪里走,却对预测变得多么危险视而不见。
通过整合位置-尺度噪声模型 (LSNM) 并推导出数学上严谨的感知不确定性的噪声调度 , NsDiff 提供了一个通用的框架。它本质上是在说: “让我们利用扩散模型的力量,但让我们用关于均值和方差的明确、自适应的先验来引导它们。”
对于学生和从业者来说,这篇论文是关于归纳偏置 (inductive bias) 的一堂精彩课程。一个强大的通用模型 (如标准 DDPM) 往往会输给一个结合了特定问题结构知识 (如方差随时间变化这一事实) 的模型。随着我们迈向使用 AI 进行关键基础设施和金融决策,像 NsDiff 这样能够诚实且准确地报告自身不确定性的工具将是不可或缺的。